
999kao.com
(完整版)用坐标表示平移练习题及标准答案20220814.docx
在平面直角坐标系xOy中,已知点A(2,3),若将OA绕原点O逆时针旋转180°得到0A′,
则点A′在平面直角坐标系中的位置是在
(A)第一象限 (B)第二象限 (c)第三象限 (D)第四象限
如图所示,一轻质杠杆OA可绕O点无摩擦转动,A端用绳子系在竖直墙壁的B点,在杠杆的C点悬挂一重为20N的物体,杠杆处于水平静止状态.已知OA长为50cm,OC长为30cm,∠OAB=30o.
(1)请在图中画出绳子对杠杆拉力F的力臂.
F的力臂如图所示。
(2)若△P1OA1与△P2A1A2均为等边三角形,求
此反比例函数的解析式及A2点的坐标

此题为判断题(对,错)。
622 用坐标表示平移基础过关作业C(-1,2),(-2,4),(0,1) D(5,2),(4,4),(6,1)综合创新作业1P(x,y)经平移后对应点为P (x-3,y-5),求A 、B 、C 的坐标11111 / 5 7如图,一个机器人从 O 点出发,向正东方向走 3 米到达 A 点,再向正北1方向走 6 米到达 A 点,再向正西方向2走 9 米到达 A 点,再向正南方向走312 米到达 A 点,再向正东方向走 154566标是_8(创新题)在直角坐标系中,A(-3,4),B(-1,-2),O 为原点,求三角形 AOB 的面积1212与点 A 关于_对称,点 A 与点 A 关于_对称21培优作业11成OA B ,第三次将OA B 变换成OA B ,已知A(1,3),A (2,3),A (4,3),222233123123 (1)观察每次变换前后的三角形有何变化,找出规律,按些变换规律将OA B 变换33成OA B ,则 A 的坐标是_,B 的坐标是_4444(2)若按第(1)题的规律将OAB 进行了 n 次变换,得到OA B , 比较每次变换nnn蜘蛛网与线路最短问题爸爸出差前,留给小华一道题: 1因为 A(4,3),B(3,1),C(1,2)117解:以点 O 为原点,正向方向为 x 轴正方向,正北方向为 y 轴正方向,建立如答图所示的平面直角坐标系,题中机器人运动的过程,实质23456因此,在以 O 点为坐标原点,正北方向为 y轴正方向的平面坐标系中,A 的坐标为(9,12)64 / 5 AC=3,BD=1,CD=6,OD=211= (1+3)6-( 34+ 12)=52229(3,-2);(-3,-2);x 轴;原点;y 轴10(1)(16,3);(32,0)点拨:A(1,3),A (2,3),A (4,3),A (8,3),其纵坐标都为3,123而横坐标依次为2 ,2 ,2 ,2 因此,A (2 ,3),即A (16,3)0123444同理,B(2,0),B (4,0),B (8,0),B (16,0),它们的纵坐标都是0,123而横坐标依次是2 ,2 ,2 ,2 ,因此得出B (2 ,0),即B (32,0)12344+144(2)(2 ,3);(2 ,0)nn+1点拨:首先确定出平面直角坐标系的原点, x轴、y 轴的正方向12解:(1)平移后的小船如答图所示5 / 5
如图所示某种材料的σ-ε曲线,若在k点时将荷载慢慢卸掉,则σ-ε曲线将沿着与Oa平行的直线kA回落到A点,从图可以看出( )。
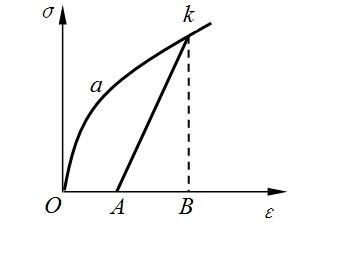
A OA段是弹性变形,AB段是塑性变形
B OA段是塑性变形,AB段是弹性变形
C 如果在重新加载,σ-ε曲线将沿着Oa上升到k点
D 如果在重新加载,σ-ε曲线将沿着Bk上升到k点
在直角坐标系中描出下列各组点,并将各组内的点用线段依次连接起来。
①(0,0)(1,3)(2,0)(3,3)(4,0)
②(0,3)(1,0)(2,3)(3,0)(4,3)观察所得的图形,你觉得它像什么?
已知P1=12,P2=10,距离OA=1O,OB=8.66,OC=4.36,AB=5,AC=9,则合力对A点的力矩为( )。
A.140
B.150
C.160
D.170
在空间直角坐标系中,已知点A(1,0,2),B(1,-3,1),点M在y轴上,且M到A与到B的距离相等,则M的坐标是________。


(A)1 个
(B)2 个
(C)3 个
(D)4 个
自由度定义:完全、确定地描述受完整约束系统位置的独立坐标的数目。
自由度公式:F=3n-2P5-P4。
更多 “(完整版)用坐标表示平移练习题及标准答案20220814.docx” 相关考题
相关内容
最新试卷
热门试卷
- 2022年二级注册建造师机电管理与实务模拟考试题库试卷二含参考答案-
- 国家开放大学电大专科《城市轨道交通安全管理》2027-2028期末试题及答案_
- 精品电大国家开放大学《社区护理学》形考任务2试题及答案_
- 2022年广东省安全员B证建筑施工企业项目负责人安全生产考试试题(同步测试)模拟卷及参考答案{9}-
- 《中级经济法》模拟试题
- XXXX年广东省会计从业资格会计专业知识无纸化考试大题
- 2022临床执业医师医学综合笔试部分4试题及答案
- 基础会计课后参考答案-20220810.docx
- 2022十五套公务员考试常识判断综合练习及答案
- 最新2022年全国会计考试初级会计电算化(用友版)(3)固定资产